ในที่สุดนักวิทยาศาสตร์ก็ได้พัฒนาความก้าวหน้าในการพัฒนากล้องส่องตรวจลำไส้ใหญ่แบบกึ่งอิสระโดยใช้หุ่นยนต์เพื่อนำอุปกรณ์ทางการแพทย์เข้าสู่ร่างกายของเราไดแล้วและมันก็คือความหวัง ของระบบหุ่นยนต์อัจฉริยะที่สามารถนำเครื่องมือไปยังตำแหน่งที่แม่นยำในร่างกายเพื่อทำการตรวจชิ้นเนื้อหรืออนุญาตให้ตรวจเนื้อเยื่อภายในได้

หุ่นยนต์ช่วยในการส่องกล้องตรวจลำไส้ใหญ่ ด้วยการจัดการแม่เหล็กอย่างน่าทึ่งและเป็นเคลื่อนไหวอย่างอิสระทำให้เข้าถึงรับภายในมากขึ้น เป็นสุดยอดของการวิจัย 12 ปีโดยทีมนักวิทยาศาสตร์นานาชาติที่นำโดยมหาวิทยาลัยลีดส์ งานวิจัยนี้ตีพิมพ์ในวันนี้ (วันจันทร์ที่ 12 ตุลาคม) ในวารสารวิทยาศาสตร์ Nature Machine Intelligence การทดลองผู้ป่วยโดยใช้ระบบนี้สามารถเริ่มได้ในปีหน้าหรือต้นปี 2565
Pietro Valdastri ศาสตราจารย์ด้านหุ่นยนต์และระบบอิสระที่ลีดส์เป็นผู้ดูแลการวิจัย เขากล่าวว่า
“ การส่องกล้องลำไส้ใหญ่ทำให้แพทย์สามารถมองเห็นโลกที่ซ่อนอยู่ลึกเข้าไปในร่างกายมนุษย์และมีบทบาทสำคัญในการตรวจคัดกรองโรคต่างๆเช่นมะเร็งลำไส้ใหญ่และทวารหนัก แต่เทคโนโลยีนี้ยังคงไม่เปลี่ยนแปลงมานานหลายทศวรรษ
“สิ่งที่เราได้พัฒนาขึ้นคือระบบที่ง่ายขึ้นสำหรับแพทย์หรือพยาบาลในการผ่าตัดและทำให้ผู้ป่วยเจ็บปวดน้อยลงนับเป็นก้าวสำคัญในการดำเนินการเพื่อให้การส่องกล้องตรวจลำไส้ใหญ่สามารถใช้งานได้ในวงกว้างมากขึ้นซึ่งจำเป็นอย่างยิ่งหากต้องระบุมะเร็งลำไส้ใหญ่และทวารหนักเร็ว”
มากไปกว่านั้น ระบบนี้ใช้งานง่ายกว่านักวิทยาศาสตร์นั้นก็เป็นความหวังของทีมแพทย์ว่าจะรักษาผู้ป่วยได้มากขึ้น และจะสามารถดำเนินการตามขั้นตอนนี้และอนุญาตให้ผู้ป่วยเข้าถึงการส่องกล้องลำไส้ได้มากขึ้น
การส่องกล้องลำไส้ใหญ่เป็นขั้นตอนในการตรวจดูทวารหนักและลำไส้ใหญ่ การส่องกล้องตรวจลำไส้ใหญ่แบบเดิมจะดำเนินการโดยใช้ท่อกึ่งยืดหยุ่นซึ่งสอดเข้าไปในทวารหนักซึ่งเป็นกระบวนการที่ผู้ป่วยบางรายรู้สึกเจ็บปวดมากจนต้องใช้ยาชา ด้วยเหตุผลนั่นเองเลยมีการคิดค้นอุปกรณ์ในการรักษาแบบยื่นหยุ่นไม่ต้องพึ่งยาชาแล้วมันมีการทำงานยังไงไปดูกันดีกว่า
ลำไส้ใหญ่แบบยืดหยุ่นแม่เหล็ก
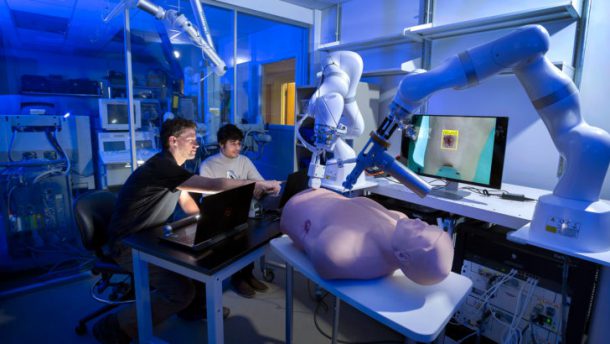
ทีมวิจัยได้พัฒนาอุปกรณ์รูปทรงแคปซูลที่มีขนาดเล็กกว่าซึ่งเชื่อมต่อกับสายเคเบิลแคบ ๆ และสอดเข้าไปในทวารหนักจากนั้นนำเข้าที่ไม่ใช่โดยแพทย์หรือพยาบาลที่ดันลำไส้ใหญ่ แต่ใช้แม่เหล็กบนแขนหุ่นยนต์ที่วางอยู่เหนือผู้ป่วย แขนหุ่นยนต์เคลื่อนที่ไปรอบ ๆ ตัวผู้ป่วยขณะที่มันเคลื่อนตัวแคปซูล ระบบตั้งอยู่บนหลักการที่ว่าแรงแม่เหล็กดึงดูดและขับไล่
แม่เหล็กที่อยู่ด้านนอกของผู้ป่วยจะทำปฏิกิริยากับแม่เหล็กเล็ก ๆ ในแคปซูลภายในร่างกายโดยเคลื่อนผ่านลำไส้ใหญ่ นักวิจัยกล่าวว่ามันจะเจ็บปวดน้อยกว่าการส่องกล้องลำไส้แบบเดิม การนำแขนหุ่นยนต์สามารถทำได้ด้วยตนเอง แต่เป็นเทคนิคที่ยากที่จะเชี่ยวชาญ ในการตอบสนองนักวิจัยได้พัฒนาระดับความช่วยเหลือหุ่นยนต์ในระดับต่างๆ งานวิจัยล่าสุดนี้ได้ประเมินประสิทธิภาพของความช่วยเหลือจากหุ่นยนต์ในระดับต่างๆในการช่วยเหลือพนักงานที่ไม่ใช่ผู้เชี่ยวชาญในการดำเนินการตามขั้นตอนนี้
แล้วหุ่นยนต์ตัวนี้จะช่วยในการตรวจได้ดีขนาดไหนล่ะ ระดับความช่วยเหลือของหุ่นยนต์ การควบคุมหุ่นยนต์โดยตรง นี่คือจุดที่ผู้ควบคุมควบคุมหุ่นยนต์โดยตรงผ่านจอยสติ๊ก ในกรณีนี้ไม่มีความช่วยเหลือใด ๆ กล้องส่องระยะไกลอัจฉริยะ ผู้ปฏิบัติงานมุ่งเน้นไปที่ตำแหน่งที่พวกเขาต้องการให้แคปซูลไปอยู่ในลำไส้ใหญ่โดยปล่อยให้ระบบหุ่นยนต์คำนวณการเคลื่อนไหวของแขนหุ่นยนต์ที่จำเป็นเพื่อให้แคปซูลเข้าที่ การนำทางแบบกึ่งอิสระ ระบบหุ่นยนต์นำทางแคปซูลผ่านลำไส้ใหญ่โดยอัตโนมัติโดยใช้การมองเห็นของคอมพิวเตอร์แม้ว่าผู้ปฏิบัติงานจะสามารถแทนที่สิ่งนี้ได้
ในระหว่างการจำลองห้องปฏิบัติการเจ้าหน้าที่ที่ไม่ใช่ผู้เชี่ยวชาญ 10 คนถูกขอให้นำแคปซูลไปยังจุดภายในลำไส้ใหญ่ภายใน 20 นาที พวกเขาทำเช่นนั้นห้าครั้งโดยใช้ความช่วยเหลือสามระดับที่แตกต่างกันการใช้การควบคุมหุ่นยนต์โดยตรงผู้เข้าร่วมมีอัตราความสำเร็จ 58% ซึ่งเพิ่มขึ้นเป็น 96% โดยใช้การส่องกล้องทางไกลอัจฉริยะและ 100% โดยใช้การนำทางแบบกึ่งอิสระ
ในขั้นตอนต่อไปของการทดลองผู้เข้าร่วมสองคนถูกขอให้นำเครื่องตรวจลำไส้ใหญ่แบบเดิมเข้าไปในลำไส้ของสุกรที่ได้รับยาสลบสองตัวจากนั้นให้ทำซ้ำงานด้วยระบบหุ่นยนต์ที่ควบคุมด้วยแม่เหล็กโดยใช้ระดับความช่วยเหลือที่แตกต่างกัน สัตว์แพทย์เข้าร่วมเพื่อให้แน่ใจว่าสัตว์ไม่ได้รับอันตราย
ผู้เข้าร่วมได้รับคะแนนจาก NASA Task Load Index ซึ่งเป็นตัวชี้วัดว่าการเก็บภาษีงานเป็นอย่างไรทั้งทางร่างกายและจิตใจ ดัชนีภาระงานของ NASA เปิดเผยว่าพวกเขาพบว่าการใช้งานโคลโลสโคปด้วยหุ่นยนต์ช่วยได้ง่ายขึ้น ความรู้สึกขุ่นมัวเป็นปัจจัยสำคัญในการใช้งานเครื่องตรวจลำไส้ใหญ่แบบเดิมและผู้เข้าร่วมสามารถควบคุมหุ่นยนต์ได้โดยตรง
James Martin นักวิจัยระดับปริญญาเอกจาก University of Leeds ซึ่งเป็นผู้นำการศึกษาร่วมกันกล่าวว่า “การใช้งานแขนหุ่นยนต์เป็นเรื่องที่ท้าทายมันไม่ได้ใช้งานง่ายมากนักและนั่นทำให้เกิดการหยุดชะงักของการพัฒนาโคโลสโคปแบบยืดหยุ่นแม่เหล็ก
“แต่เราได้แสดงให้เห็นเป็นครั้งแรกว่าสามารถยกเลิกการทำงานดังกล่าวไปยังระบบหุ่นยนต์ได้โดยปล่อยให้ผู้ปฏิบัติงานนึกถึงงานทางคลินิกที่พวกเขากำลังดำเนินการอยู่และเป็นการสร้างความแตกต่างที่วัดผลได้ในประสิทธิภาพของมนุษย์” เทคนิคที่พัฒนาขึ้นเพื่อทำการตรวจส่องกล้องลำไส้และยังนำไปใช้กับอุปกรณ์ส่องกล้องอื่น ๆ เช่นที่ใช้ในการตรวจระบบทางเดินอาหารส่วนบนหรือปอด
นอกจากนั้นการส่องกล้องตรวจลำไส้ด้วยหุ่นยนต์มีศักยภาพที่จะทำได้หมายความว่าคนที่ตรวจไม่จำเป็นต้องเป็นผู้เชี่ยวชาญ ในการจัดการอุปกรณ์ ถิอเป็นการประหยัดแรงคนไปในตัว
แล้วหวังว่าเทคนิคนี้จะสามารถใช้งานได้ในวงกว้างมากขึ้น กระจายไปถึงคลินิกและศูนย์สุขภาพมากกว่าโรงพยาบาลเพาะกำลังมีคนน้อยกว่าและคนไข้จะได้เข้าถึงการรักษามากขึ้น บางทีโรงพยาบาลมันเต็มหรือเราเองต้องไปนั่งรอนานๆ คลินิกและศูนย์สุขภาพ ก็จะช่วยได้อีกทางนึง





